한국어
최근 가와사키와 엔비디아가 협력하여 실리콘밸리에 문을 연 ‘피지컬 AI 센터’는 로봇 경험의 패러다임이 어디로 향하는지 명확히 보여준다. 이는 단순히 새로운 연구 시설의 개소를 넘어, 로봇이 물리적 세계와 상호작용하는 방식, 즉 피지컬 AI(Physical AI)가 산업의 핵심으로 부상했음을 알리는 신호탄이다. 이제 로봇의 가치는 하드웨어의 정교함을 넘어, 현실의 불확실성에 얼마나 지능적으로 대응하는지에 따라 결정된다. 로봇이 실제 공장, 물류센터, 혹은 일상 공간에 투입되기 전, 예측 불가능한 모든 변수를 미리 경험하고 학습하는 가상의 훈련장이 필수가 된 것이다.
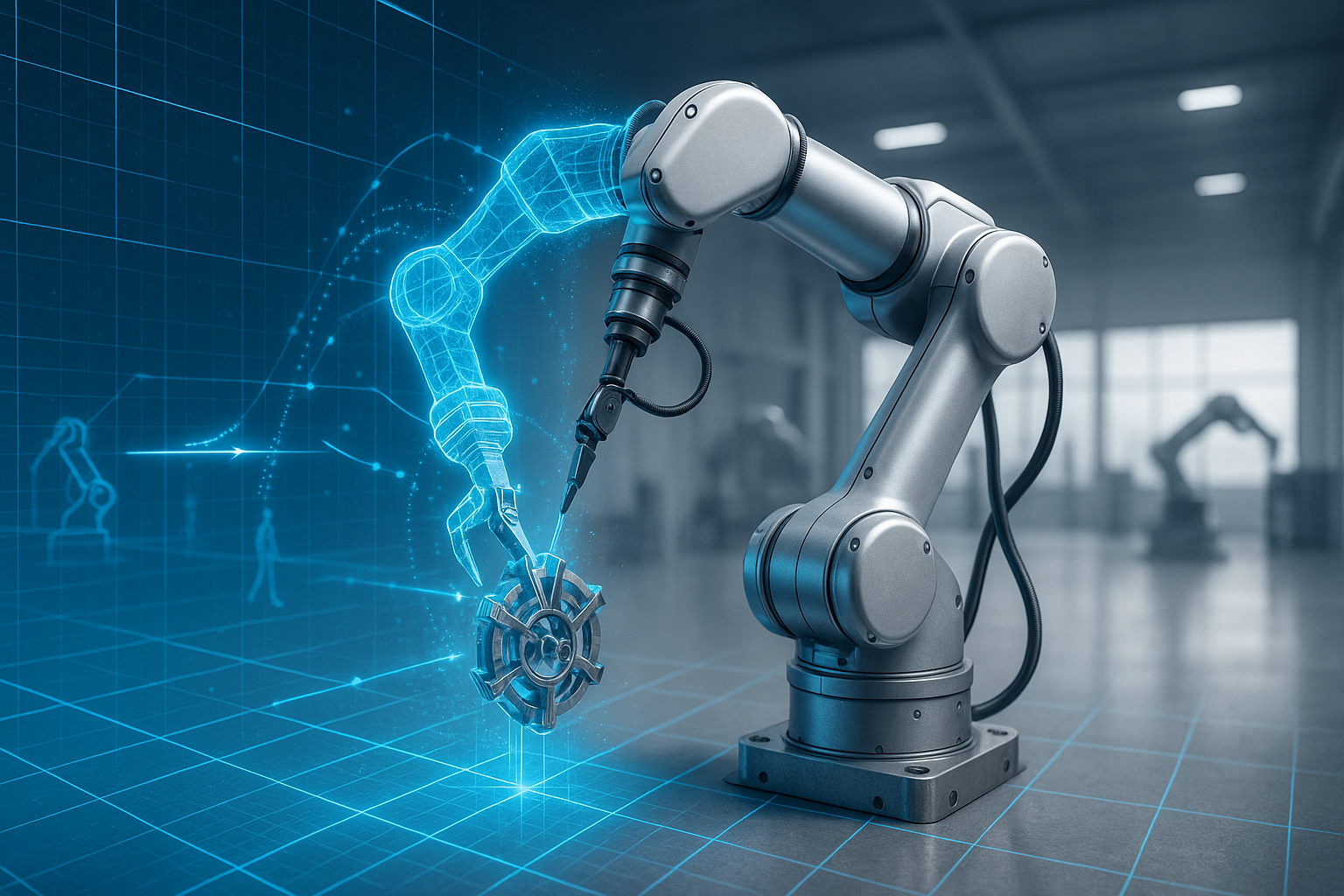
이러한 가상 훈련의 핵심에 바로 ‘로봇 디지털트윈’과 ‘Sim-to-Real’ 기술이 있다. 디지털트윈은 현실의 공간과 설비, 로봇을 가상 세계에 그대로 복제한 거울 세계다. 엔비디아의 아이작 심(Isaac Sim)과 같은 시뮬레이션 플랫폼은 이 디지털트윈 안에서 로봇이 수만, 수백만 번의 작업을 반복하며 데이터를 축적하고 최적의 행동 패턴을 학습하도록 돕는다. 가상 환경에서 로봇은 충돌 위험 없이 동선을 최적화하고, 다양한 시나리오에 맞춰 협업 능력을 기르며, 고도의 정밀성을 요구하는 작업을 완벽하게 마스터한다. 이 과정에서 생성된 방대한 양의 합성 데이터(Synthetic Data)는 로봇의 지능을 기하급수적으로 성장시키는 자양분이 된다.
과거의 로봇이 정해진 규칙만을 따르는 기계였다면, 피지컬 AI 시대의 로봇은 스스로 학습하고 성장하는 유기체에 가깝다. 가상 커미셔닝(Virtual Commissioning)은 그 성장을 위한 필수 과정이다. 실제 라인을 멈추지 않고도 디지털트윈 환경에서 새로운 로봇이나 공정을 미리 시뮬레이션하고 검증함으로써, 현장 도입에 드는 시간과 비용, 위험을 획기적으로 줄일 수 있다. 이는 단순히 효율을 높이는 것을 넘어, 로봇을 통한 공간 경험의 질 자체를 바꾸는 혁신이다. 로봇이 우리 곁에서 더 안전하고 똑똑한 파트너가 될 수 있는 것은 바로 이처럼 현실보다 더 현실 같은 가상 세계에서의 치열한 훈련 덕분이다.
결국 피지컬 AI의 성패는 현실과 가상의 간극을 얼마나 줄이느냐에 달려있다. 가상에서 완벽했던 로봇이 현실에서 제대로 작동하지 못하는 ‘Sim-to-Real’ 격차를 극복하는 것이 최대 과제다. 최근 3D 가우시안 스플래팅 같은 기술은 간단한 영상 촬영만으로도 현실 공간을 매우 사실적인 3D 가상 환경으로 빠르게 변환하여 이 간극을 메우고 있다. 브랜드가 고객에게 새로운 로봇 기술을 선보이는 전시 공간이나 팝업 스토어를 상상해 보라. 방문객이 직접 스마트폰으로 공간을 스캔해 디지털트윈을 생성하고, 그 안에서 가상의 로봇에게 미션을 주며 Sim-to-Real 과정을 직접 체험하게 하는 몰입형 경험은 기술의 가치를 가장 직관적으로 전달하는 방식이 될 것이다. 로봇의 경험은 이제 현실 공간에 국한되지 않는다. 그것은 현실과 완벽하게 동기화된 무한한 가상 공간에서 시작되고 완성된다.

English
The recent opening of the ‘Physical AI Center’ in Silicon Valley, a collaboration between Kawasaki and NVIDIA, clearly signals the new direction of robot experience. More than just the launch of a new research facility, it marks the emergence of Physical AI—the way robots interact with the physical world—as a core industrial paradigm. A robot’s value is no longer determined by its mechanical precision alone, but by how intelligently it responds to the uncertainties of the real world. Before a robot is deployed in an actual factory, logistics center, or daily space, a virtual training ground where it can experience and learn from every conceivable variable has become essential.
At the heart of this virtual training lies ‘Robot Digital Twin’ and ‘Sim-to-Real’ technology. A digital twin is a mirror world, a perfect digital replica of a real-world space, its equipment, and its robots. Simulation platforms like NVIDIA Isaac Sim allow robots within these digital twins to accumulate data and learn optimal behaviors by repeating tasks hundreds of thousands or even millions of times. In this virtual environment, a robot can optimize its movements without collision risks, develop collaborative skills for various scenarios, and master high-precision tasks to perfection. The vast amount of synthetic data generated during this process becomes the nutrient that fuels the exponential growth of the robot’s intelligence.
If robots of the past were machines that merely followed pre-programmed rules, robots in the era of Physical AI are more like living organisms that learn and evolve on their own. Virtual commissioning is a critical part of this evolution. By simulating and verifying new robots or processes in a digital twin environment without halting the actual production line, companies can dramatically reduce the time, cost, and risks associated with real-world implementation. This is more than just an efficiency gain; it is an innovation that transforms the very quality of the spatial experience mediated by robots. The reason robots can become safer and smarter partners in our lives is thanks to this intense training in a virtual world that is often more real than reality itself.
Ultimately, the success of Physical AI hinges on bridging the gap between the virtual and the real. Overcoming the ‘Sim-to-Real’ gap, where a robot that performed perfectly in simulation fails to operate correctly in the real world, is the primary challenge. Recently, technologies like 3D Gaussian Splatting are helping to close this gap by quickly transforming real spaces into highly realistic 3D virtual environments with a simple video capture. Imagine an exhibition or a pop-up store where a brand showcases its new robotic technology. An immersive experience where visitors can scan the space with their smartphones to generate a digital twin and then assign missions to a virtual robot, witnessing the Sim-to-Real process firsthand, would be a powerful way to communicate the technology’s value. The robot’s experience is no longer confined to physical space. It begins and is perfected in a boundless virtual realm, perfectly synchronized with reality.
로봇·디지털트윈 행사 일정
본 글은 아래 원문 기사와 공개 자료를 바탕으로 작성되었습니다. 원문 이미지의 저작권 보호를 위해 해당 이미지는 본문에 직접 게재하지 않았습니다.
- Kawasaki Heavy Industries, Ltd. — Kawasaki Opens Physical AI Center in Silicon Valley
- The Robot Report — FANUC partners with Google to advance physical AI in its robots
- Northeastern Global News — Physical AI is already here. But what is it?
- arXiv — TwinRL: Digital Twin–Driven Reinforcement Learning for Real-World Robotic Manipulation
- Labellerr — Data Collection for Embodied AI: Teleoperation, Sim-to-Real and Industrial Datasets in 2026
댓글 남기기